



CIMR-J7AAB1P5 Yaskawa Inverter
Thông số kỹ thuật:
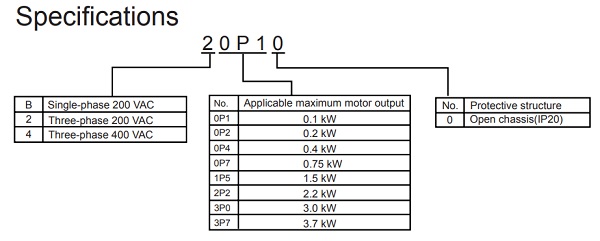
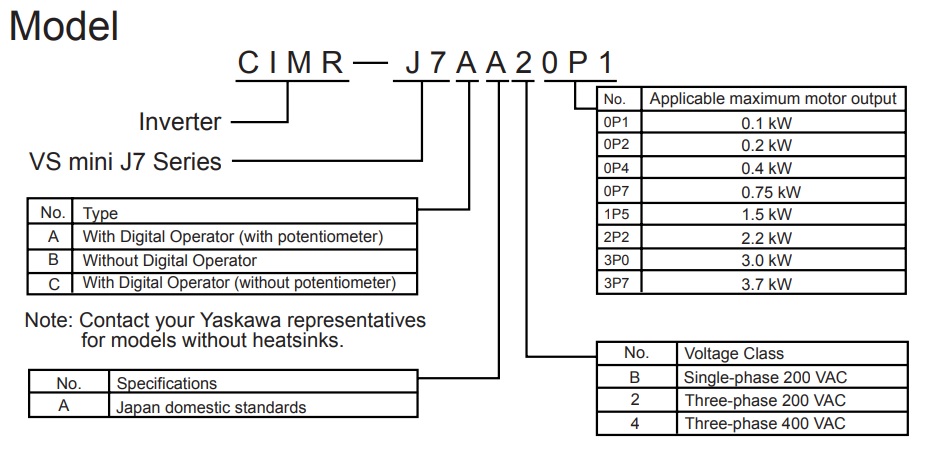
- Model đầy đủ : CIMR-J7AAB1P5
- Spec : B1P50
- Input : 1 pha 200-240VAC 50/60 Hz 20.5A
- Output : 3 pha 0 - 240V 0.0 - 400Hz 8A 3.0 KVA
- Công suất : 1,5KW
- Trọng lượng : 1.5 Kg
- Cấp bảo vệ IP 20
Specifications
|
Applicationof Inverter Yaskawa J7 |
Replacing contactors, replacing single-phase motors, machine standardization, food processing machinery, conveyors, mass-flow machinery (pumps and fans) |
|
Power supply |
1P, 200 to 240Vac (− 15% to +10%)50/60 Hz(± 5%) |
|
Rated capacity |
1.5 kW |
|
Rated current |
8.0A |
|
Output frequency range |
0.1-400Hz |
|
Starting Torque |
|
|
Overload current rating |
150% rated output current for one minute |
|
Control Method |
Sine wave PWM (V/f Control) |
|
Braking unit |
All models are equipped with a braking transistor |
|
Input |
Forward Run Input, Multi-function Input Selection, Multi-function Input Selection Common |
|
Ouput |
NO Contact Output, NO Contact Output, Contact Output Common, Analog Monitor Output |
|
Protection Function |
Motoroverloadprotection,Instantaneous Overcurrent,Overload Protection, Overvoltage Protection, Undervoltage Protection, Momentary Power Loss,Cooling Fin Overheat, Stall Prevention, Cooling fan faul, Ground fault, Power charge indication |
|
Main Control Functions |
Accel/decel time setting, V/f pattern setting, Motor rotation direction setting, Operation mode selection, LOCAL (operator)/REMOTE (control circuit terminal) selection, Motor rated current setting, Constant set-up, Reverse run prohibit, Multi-step speed selection, Adjusting frequency setting signal, Adjusting frequency upper and lower limits, Using two accel/decel times, Operating at low speed, Automatic restart after momentary power loss, Soft-start characteristics, Torque detection, Continuing operation by automatic fault reset, Frequency detection, Operating coasting motor without trip, Avoiding resonance, Holding accel/decel temporarily, Reducing motor noise or leakage current, Using frequency meter or ammeter, Operator stop key selection, Using input signals, Selecting stopping method, Applying DC injection braking, Using output signals, Adjusting Motor Torque, Preventing motor from stalling (Current limit), Decreasing Motor Speed Fluctuation, Motor Protection |
|
Communication |
MEMOBUS |
|
Peripheral Devices and Options |
LCD Operator, AC Reactor, DC Reactor, Braking Resistor, noise filter... |
|
Degree of protection |
IP20 open-chassis |





